
游泳是自然界中各种规模的许多生物所采用的一种运动形式。
具有较小质量的微生物在介质中会遇到粘性力的支配,因此要求其形状不随时间变化,以实现与流体力学一致的流体推进。
为了克服这一挑战,Euglena家族的单细胞鞭毛进化了一种称为“真骨类运动”的特征运动,该运动使人体显着改变形状,使生物能够在粘性流体和微小空间中导航中国机械网okmao.com。
这种改变身体形状并在受限空间和混乱环境中移动的能力在工程仿生机器人中特别具有吸引力。
受串珠类的启发,克里希纳·马纳斯维·迪古玛蒂(Krishna Manaswi Digumarti)和工程与数学系的同事们介绍了多段式软机器人EuMoBot的设计和开发。
仿生机器人可以复制较大的身体变形以进行运动。在这项研究中,科学家设计了两个大小不同的机器人,以使其内部体积恒定。
该工程规程利用充满流体的弹性腔体的超弹性来复制类鹰嘴类动物的运动。
在这两个中,较小的机器人每个周期以1/5体长的速度移动,而较大的机器人每个周期以1/10体长的速度移动。
研究表明软仿生机器人是 可以用来改变形状和复制生物运动,同时充当研究仿生机器人的工具。
科学家们还提出了一种基于椭圆傅立叶描述符的定量方法,以表征和比较机器人的形状及其生物学上的类鹰嘴豆形生物。
结果表明形状相似度达到85%,表明该工程技术可用于开发微型机器人。
该方法使科学家能够了解非线性,动态软机器人中形状的演变,这些机器人没有特定的形状可以建模。该研究的结果现已发表在《皇家学会接口杂志》上。
通过将三个HEB执行器结合在一起来制造多段软机器人。
a)具有两半和用于铸造有机硅弹性体的型芯的三维印刷模具。
中部:单个执行器腔室。右:以两个不同的比例制造的三段式机器人。显示的是英语的便士。
b)机器人的剖视图,显示了不同的腔室。每个腔室都装有入口管和出口管。提供足够的松弛度以允许腔室自由膨胀。
c)上图:匙状突运动期间细胞形状的轮廓。
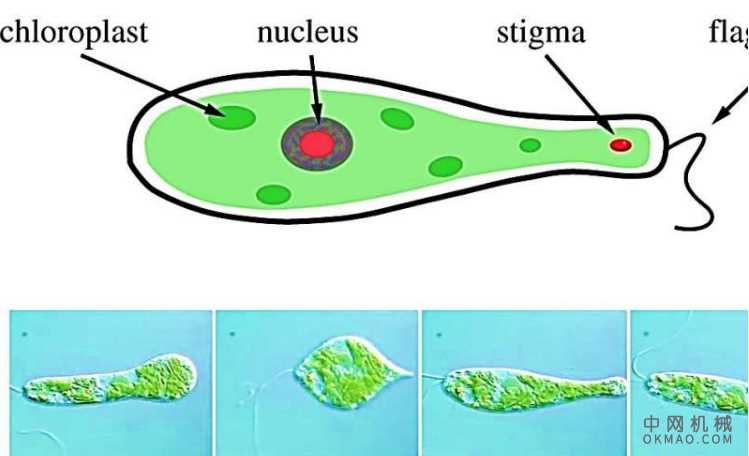
仿生工程策略激发了研究人员从动物界寻求设计并创造出具有生物学灵感的机器人。延胡索是单细胞鞭毛,由于它们具有植物和动物的特性,因此在实验室中被广泛研究为模型。这种生物利用独特的策略在低雷诺数下游泳,并且研究其运动规律相对较新。
生物体的细胞通常配备有一个或多个鞭毛来游泳,同时还表现出第二种较慢的运动,称为类鹰骨运动,其中细胞的形状发生了巨大变化。
在本研究中,Digumarti等人。根据微生物的行为,使用第二种运动形式设计了一个柔软而功能强大的机器人。
尽管人们相信,由于强光,光,热,化学冲击或接触等强烈刺激,细胞大小发生了变形,但在胚状细胞运动期间观察到的形状变化的进化原因尚不清楚。
当将微生物置于类似于自然环境的充满液体的迷宫中时,许多微生物表现出类胚珠运动,表明该运动非常适合于受限环境。
这种性质的运动对于在软机器人技术领域中受生物启发的机器人使用大体变形穿越杂乱的环境非常有用。
在这项研究中,作者向工程师EumoBot展示了设计,驱动原理和制造方法,EuMoBot是一个演示类鹰骨运动的软机器人。
通过流体的运动相对于天然微生物的运动进行定量。由于先前已经详细研究了形状变化的潜在机制,因此Digumarti等人(2002年)提出。
专注于机器人形式的鳗鱼的宏观形状,而没有在微观水平上复制变化。
为了产生柔软的流体致动器,研究人员设计了一种新型的波纹管状装置,称为“超弹性波纹管”(HEB)致动器,该装置先前已对此进行了详细介绍。
a)证明机器人在刚性螺钉之间膨胀时的顺从性。b)在一个平板上的一个运动周期的开始和结束时的图像序列。c)机器人使用蠕虫式步态在管道内爬升。
工程师使用3-D打印模具来形成执行器的形状。他们制造了两个大小不同的机器人。
他们浇铸了三个执行器室,然后将弹性体与注入模具中的颜料混合,以固化过夜,并形成半透明的白色外壳。受生物启发的软机器人包含一个充气/放气腔,可复制类鳗鱼形状并实现相似运动。
为了测试工程机器人的运动,研究人员将它们放在装有甲基纤维素水溶液的水箱中。
每个实验中的机器人具有恒定的内部容积,并且它们的内部流体从一个腔室移动到另一个腔室,从而将膨胀波特性的运动再现为类胚珠。
两种机器人都可以通过改变其身体形状来游泳。速度差异取决于通过软机器人腔室泵送的流体量。
科学家们观察了两种尺寸下相对于雷诺数的软机器人和微生物之间的流体动力学相似性。软机器人不仅限于在流体环境中工作,还与生物类似,
软机器人控制架构的示意图。摄像机用于确定机器人的当前状态。MATLAB脚本会处理该信息,以确定机器人的当前状态,其中包括每个小室的膨胀和收缩。
然后,它通过适当的控制信号传递给Arduino,该Arduino控制泵和阀的操作以引导机器人内的流体流动。
机器人采用基于反馈的方法进行自主控制,从而无需对泵的动力学和机器人内的流体流动进行建模。
通过摄像头和MATLAB脚本进行机器视觉的腔室尺寸估算可提供反馈。该系统使用每个腔室的膨胀和收缩来控制机器人内部的流体流动。机器人内部的传感器可以直接测量流体压力。
机器人的形状估计是通过使用生物体先前的视频记录提取的数学描述符来完成的。
科学家使用了椭圆傅立叶描述子在本研究中首次使用闭合轮廓来描述超弹性软机器人的形状,并将其与生物有机体进行比较。
通过四个主要步骤提取椭圆傅里叶描述符,以估计物体的形状。特征向量捕获的形状变化量用于定量测量机器人和生物之间的形状相似度。
前三个主要成分清楚地描述了类胡萝卜素的形状,而机器人中的方差分布在更多的成分上,这表明类胡萝卜素的极端形状并未在机器人中完全复制。
a)形状估计的四个阶段。首先,从图像中提取感兴趣区域。接下来,确定边界。然后将该轮廓编码为一组Freeman整数。
最后,计算一组傅立叶系数,并重建形状。b)前五个特征向量的归一化特征值,描述了与正弦形物体相比软机器人的形状。
基于特征值,与较小的机器人相比,较大的机器人复制的形状更接近于类胚珠。观察到差异的原因可能是由于波纹管(超弹性波纹管-HEB)的褶皱设计所致。
折叠角,其数量和密度的参数可以进一步优化以实现更好的形状复制。
与天然微生物相比,该机器人在将流体从一个腔室转移到另一个腔室时没有产生平稳的移动,这可能是因为合成边界壁尽管具有弹性也可能会局部限制腔室的膨胀。
这也可以解释机器人无法呈现极端形状的原因。
总体而言,多段式软机器人EuMoBot不仅可以在非流体环境中游泳,变形和运动,而且还能复制鹰嘴豆的运动,从而使软而自满的机器人可以在狭窄的空间中操作。
需要更多的工作来理解主要组成部分和运动能力之间的关系。
由于相关材料的抗拉强度及其整体式设备设计,EuMoBots展示的形状的末端受到限制。诸如3-D打印和软光刻的替代制造技术可以解决材料弹性的限制。
通过复制微观的防护膜结构,还可以将机器人设计成具有数学上的准确性的类胡萝卜素。有机体固有的功能,可在运动过程中平稳过渡。
操纵能力可以包括形状记忆合金致动线圈,也可以包括在机器人的设计中,也可以使用带有内部动力源的材料约束,以便在将来的工作中使用有弹性的微型设备。