
Unity正在展示其AI和机器学习功能如何使工业机器人受益。新的演示称为“对象姿态估计”,演示了合成数据如何帮助机器人学习而不是编程。
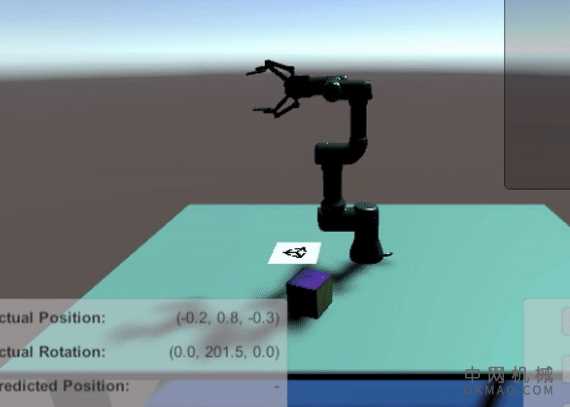
训练数据是在Unity中收集的,用于训练可预测立方体姿势的深度神经网络中国机械网okmao.com。然后将此模型部署到模拟的机器人放置任务中。
Object Pose Estimation演示成功发布了Unity的URDF Importer,这是一个开放源代码的Unity程序包,用于将机器人从其URDF文件导入到Unity场景中,该程序利用对Unity中关节运动的增强支持来实现更逼真的运动学模拟,以及Unity的ROS -TCP连接器。
这减少了在ROS节点和Unity之间传递消息的延迟,从而使机器人可以对其模拟环境进行近乎实时的响应。
Unity表示,该演示通过展示先前的工作,展示了其计算机视觉工具以及最近发布的Perception Package如何用于创建合成的,带有标签的训练数据,以训练深度学习模型来预测多维数据集的位置。
该演示提供了有关如何重新创建此项目的教程,可以通过应用定制的随机化器来创建更复杂的场景来对其进行扩展。
“这是一个学习而不是编程的系统的有力例子,并且从合成数据中学习,它能够捕获比任何程序员都更多的细微差别模式,”该公司高级副总裁Danny Lange博士说。 AI,团结。“将我们的技术分层展示了我们如何跨越一条线,并且我们开始处理真正的人工智能,在这种情况下,证明了训练机器人可能的效率。”
目标姿势估计及其相应的演示紧随Unity的最新版本之后,旨在支持流行的开放源代码机器人框架Robot Operating System(ROS)。
兰格补充说:“例如,您可以为自动驾驶汽车或昂贵的机械臂开发控制系统,而不必担心损坏设备或大幅增加工业安装成本的风险。” “能够在高保真虚拟环境中证明预期的应用程序将为许多有望通过结合人工智能和机器学习的机器人技术进行转型的行业节省时间和金钱。”