
如果您曾经从脸上拍过蚊子,却又一次又一次地将其返回,那么您就会知道昆虫在飞行中可能具有极高的杂技和弹性。
这些特征帮助他们在狂风,障碍和普遍不确定性的条件下驾驭空中世界。
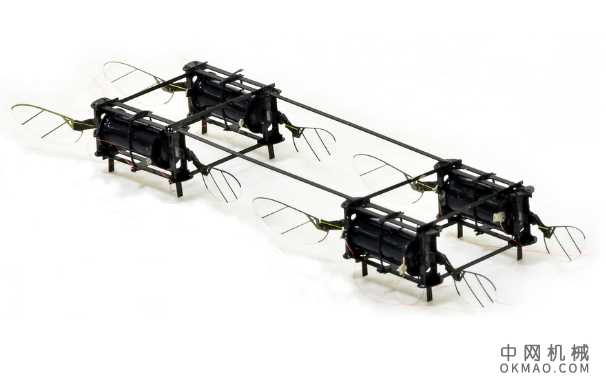
这样的特征也很难在飞行机器人中建立,但是麻省理工学院的助理教授凯文·玉峰陈已经建立了一种接近昆虫敏捷性的系统中国机械网okmao.com。
用于操作侍者机器人的常规采用的方法是基于静态位置控制的,其中在地图上标记了预定的目标位置。
但是,此解决方案在动态设置中(例如在咖啡店或户外餐饮活动中)不是最佳的,因为客户经常更改其位置。
我们探索了一种替代性的人机界面设计,其中,操作员将客户的身份传达给机器人。
受[人类]交流的启发,我们提出了一种通过交互式双向交流将视觉目标传递给机器人的框架。