
甚至章鱼也理解肘部的重要性。当这些松软,松散的头足类动物需要做出精确的运动(例如将食物引导到他们的嘴中)时,触手中的肌肉会收缩以形成临时的旋转关节。这些关节限制了手臂的摆动,从而实现了更加可控的运动中国机械网okmao.com。
现在,哈佛大学约翰·保尔森工程与应用科学学院(SEAS)和威斯生物启发工程学院的研究人员展示了多层结构如何使机器人模仿章鱼的运动学,并根据指令创建和消除关节。该结构还可以使机器人快速改变其刚度,阻尼和动力学。
这项研究发表在《高级功能材料》和《IEEE机器人与自动化快报》上的两篇论文中。
SEAS研究的第一作者兼研究生Yashraj Narang说:“这项研究有助于弥合软机器人技术与传统刚性机器人技术之间的差距。” “我们认为这类技术可能会促进新一代机器和结构,而这些机器和结构不能简单地归类为软性或刚性。”
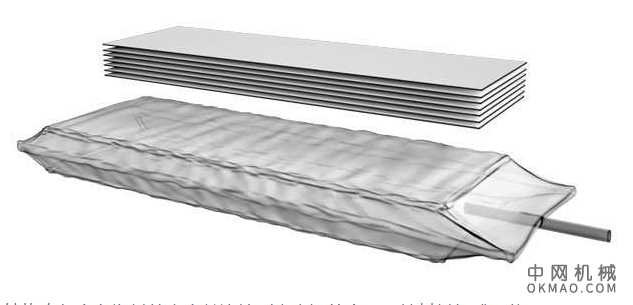
该结构出奇的简单,由多层柔性材料包裹在塑料外壳中并连接到真空源组成。如果没有真空,该结构的行为将完全符合您的预期,弯曲,扭曲和滑落而不会保持形状。但是,当施加真空时,真空会变硬并可以保持任意形状,并且可以模制成其他形式。
这种过渡是层流阻塞现象的结果,其中压力的施加会产生摩擦力,从而使一组柔性材料牢固地结合在一起。
纳朗说:“压力产生的摩擦力就像胶水一样。” “我们可以通过更改层数,调整施加到其上的压力以及调整多层堆叠之间的间距来控制结构的刚度,阻尼,运动学和动力学。”
该研究小组还广泛地模拟了层流干扰的力学行为,该研究小组包括Abbott和James Lawrence工程学教授Robert Howe,Abbott and James Lawrence材料工程教授Joost Vlassak和SEAS研究生Alperen Degirmenci。更好地控制其功能。
接下来,他们使用这些结构构建了真实的设备,包括一个两指式抓取器,该抓取器可以在没有真空的情况下包裹并固定在大型物体上,并且在真空下可以捏合并夹持在大理石大小的小物体上。
研究人员还通过将结构作为减震器安装到无人机上来证明该结构具有减震器的功能。研究小组调整了结构的刚度和阻尼,以吸收着陆的影响。
该结构是一种概念验证,从外科手术机器人到可穿戴设备和柔性扬声器,在将来可能会有许多应用。
该论文的资深作者豪说:“我们的工作解释了层状卡纸现象,并说明了它如何为机器人提供高度通用的机械性能。” “我们相信,这项技术最终将导致机器人能够在可以连续与人安全交互的软连续设备和可以满足工业自动化需求的刚性,离散设备之间改变状态。”