
著名的有关DARPA机器人挑战赛的病毒视频展示了各种各样的类人机器人笨拙地摔倒了。两足动物的运动相当不稳定,这不仅是机器人试图完成其任务的问题,而且还因为跌落会损坏非常昂贵的机器。
全球的机器人专家正以多种方式解决这个问题中国机械网okmao.com。尽管有些人希望在机器人失衡后增加一系列纠正步骤,就像人在绊倒后绊倒一样,但克里斯·豪瑟(Kris Hauser)希望机器人能够利用周围的环境。
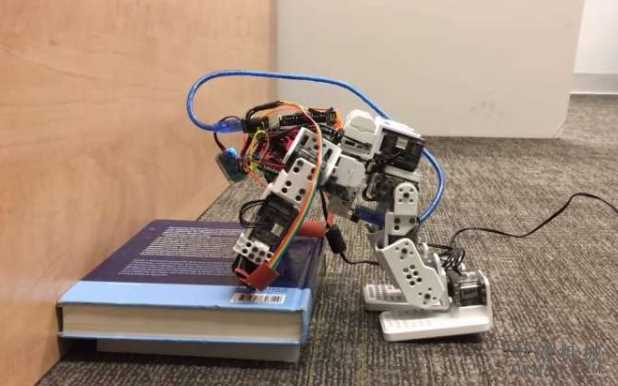
“如果一个人被推向墙壁或栏杆,他们将能够利用该表面使自己保持双手直立。我们希望机器人能够做同样的事情,”机器人副教授Kris Hauser说。
杜克大学的电气和计算机工程以及机械工程和材料科学。“我们相信,我们是唯一致力于让机器人动态选择将手放在哪里以防止跌倒的研究小组。”
尽管这些决定和行动对我们来说是第二天性,但将它们编程为机器人的反应却看似困难。为了简化过程并节省计算时间,豪瑟对软件进行了编程,使其仅专注于机器人的髋关节和肩关节。
只要机器人在跌落时不会扭曲,就只能创建稳定算法必须考虑的三个角度:脚到臀部,臀部到肩膀以及肩膀到手。机器人必须识别出触手可及的附近表面,然后快速计算出最佳角度组合以捕捉自身。
最终解决方案可以最大程度地减少机器人手接触时的冲击,并最大程度地减少手或脚打滑的机会。该算法会尽力猜测,然后使用称为直接射击的方法逐步对其进行优化。
在当前状态下,机器人会收到有关其环境的信息,并且无法自行导航。但是在不久的将来,豪瑟计划升级到具有自己的摄像头传感器的更大的机器人,以使其能够看到周围的环境。
豪瑟说:“希望到今年年底,我们应该在实际运行在有障碍物的道路上的机器人上进行实验。” “然后,我们将试图让机器人动态地映射周围的事物,并说明如何保护自己不受任意环境影响。”