
虽然看起来像是一个无缝的壮举,但对每个移动和放置都进行了仔细的考虑。
即使使用当今更加智能和自适应的机器人,对于僵硬的手来说,这项任务仍然很困难。它们倾向于仅在具有预定形状和位置的结构化环境中工作,并且通常无法应对布局或形式的不确定性中国机械网okmao.com。
不过,近年来,机器人专家已经通过用柔软,柔软的橡胶等材料制成手指来解决这一问题。这种柔韧性让这些软机器人捡拾从葡萄到盒子再到空水瓶的任??何东西,但它们仍然无法搬运大型或沉重的物品。
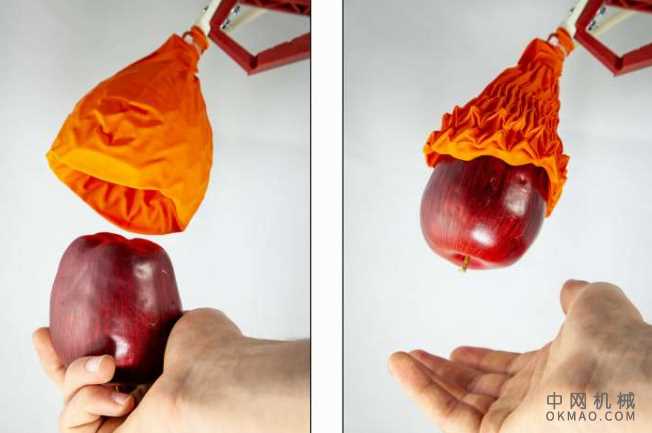
为了让这些软机器人有点手,来自麻省理工学院和哈佛大学的研究人员已经开发出一种新的夹具这既柔软性强:一个圆锥形的折纸结构坍塌在对象上,很像一个捕蝇草,拿起物品是其重量的100倍之多。此动作使抓取器可以抓握范围更广的物体-例如汤罐,锤子,酒杯,无人机,甚至是一个西兰花小花。
麻省理工学院计算机科学与人工智能实验室(CSAIL)主任,也是有关该产品的新论文的资深作者之一,麻省理工学院教授丹妮拉·罗斯(Daniela Rus)说:“我的月球发明之一就是创造一种可以自动为您包装食品的机器人。”项目。
“以前解决包装问题的方法只能处理非常有限的一类物体,例如非常轻的物体或符合盒子和圆柱体形状的物体,但是借助Magic Ball抓手系统,我们证明了我们可以拣选-并放置从酒瓶到西兰花,葡萄和鸡蛋等各种物品的任务。” Rus说。“换句话说,就是很重的物体,而又很轻的物体。精致,坚固的物体,或者具有规则或自由形状的物体。”
该项目是近年来研究人员开创性地考虑机器人设计的几个项目之一。例如,球形抓手可以比手指抓握更多的物体,但是仍然存在角度受限的问题。较软的机械手指通常使用压缩空气,但强度不足以拾取较重的物体。
同时,这种新型抓手的结构采用了完全不同的形式。该设备是圆锥形,空心且由真空供电的,灵感来自“折纸魔术球”,可以包裹整个物体并成功拾起它。
抓手具有三个部分:基于折纸的骨架结构,用于包裹该结构的气密性皮肤以及连接器。该团队使用机械橡胶模具和特殊的热收缩塑料在高温下自动折叠来创建它。
魔术球的骨骼覆盖有橡胶气球或薄薄的织物片,与该团队先前对流体驱动的折纸启发的人造肌肉(FOAM)的研究不同,后者由围绕可折叠骨骼和流体的不透气皮肤组成。
该团队将抓爪与标准机器人一起使用,以测试其在不同物体上的强度。抓取器可以抓取和提起其直径的70%的物体,这使抓取器可以拾取并容纳各种软食品,而不会造成损坏。它还可以捡起重量超过四磅的瓶子。
麻省理工学院CSAIL的联合博士后李树光说:“像亚马逊和京东这样的公司希望能够拾取各种各样的精致或不规则形状的物体,但不能使用手指式和吸盘式抓具。”哈佛大学约翰·保尔森工程与应用科学学院(SEAS)。“吸盘不能捡到任何有孔的东西,而且它们需要比基于软手指的抓手还要坚固的东西。”
该机器人目前,可以很好地与瓶子或罐头之类的圆柱形物体配合使用,这有一天可能使其成为工厂生产线的资产。毫不奇怪,夹持器的形状使其更难于夹持扁平的东西,例如三明治或书本。
“这种构造机械手的方法的主要特征之一就是它的简单性,”哈佛大学工程学院和Wyss生物启发工程学院的合著者兼教授Robert Wood说。“所使用的材料和制造策略使我们能够快速制作新的夹具原型,并根据需要针对对象或环境进行定制。”
将来,该团队希望通过添加计算机视觉来尝试解决角度和方向问题,从而使抓取器能够“看见”,并有可能抓取物体的特定部分。
UC-Santa Cruz机器人学助理教授迈克尔·韦纳(Michael Wehner)说:“这是一种非常聪明的设备,它利用3-D打印,真空和软机器人的能力,以全新的方式解决抓握问题。”谁没有参与该项目。“在未来的几年中,我可以想象看到柔软的机器人足够温柔灵巧,可以摘一朵玫瑰,而又坚固到可以安全地抬起医院的病人。”