
我们拥有可以走路,看见,说话和听见以及操纵机器人手中物体的机器人。甚至还有一个会闻到气味的机器人。
但是触感如何呢?这说起来容易做起来难,目前正在研究的某些方法有局限性,但是我们正在开发一种可以克服其中一些问题的新技术中国机械网okmao.com。
对于人类来说,当我们移动身体时,触摸起着至关重要的作用。触摸和视觉结合对于诸如捡拾物体(硬或软,轻或重,温暖或寒冷)而不损坏它们的任务至关重要。
在机器人操纵领域中,机器人手或抓手必须拿起一个物体,增加触感可以消除处理柔软,易碎和可变形物体的不确定性。
对皮肤的追求
用工程学术语量化触摸不仅需要精确了解施加到触摸传感器上的外力大小,而且还需要知道该力的确切位置,角度以及它如何与被操纵对象相互作用。
接下来的问题是机器人需要多少个传感器。开发可能包含数百甚至数千个触摸传感器的机器人皮肤是一项艰巨的工程任务。
人体皮肤具有多种传感器。
了解生物世界中触摸感应的物理机制,可以为设计等效的机器人(智能皮肤)提供深刻的见解。
但是,智能皮肤发展的主要障碍是所需的电子设备。
日常测力和触觉
触摸感通常由可以将压力转换为小的电信号的传感器测量。当您使用数字秤称量自己的体重或测量厨房中的配料时,秤可能使用的是压电传感器。
这是一种将力转化为电能的装置。然后,来自换能器的微小电流通过导线流到一个小的微芯片,该芯片读取电流强度,将其转换为有意义的重量测量值,并将其显示在屏幕上。
尽管能够感知不同程度的力,但这些电子设备仍然存在一些局限性,因此对于智能皮肤不切实际。特别地,它们对力的响应时间相对较慢。
水和某些类型的触摸感应技术不会混合使用。
还有其他类型的触摸传感器,它们基于改变其其他电特性(例如电容或电阻)的材料。您的手机屏幕可能内置了此技术,如果您在计算机上使用触控板,则肯定会使用触摸传感器。
柔软灵活的力感测
近年来,在制造可嵌入软性和柔性材料中的触摸传感器方面取得了长足进步。这正是我们智能皮肤所需要的。
但是,由于水分的存在,许多此类开发都完全失败了(由于感应类型)。(您曾经在智能手机的触摸屏上尝试过弄湿手指吗?)
现在,医疗应用是对灵活而强大的力感测需求的主要推动力。例如,智能皮肤可用于恢复对皮肤受损或周围神经病(麻木或刺痛)的患者的感觉反馈。它也可以用于赋予假肢基本的触摸感应能力。
最近,麻省理工学院和哈佛大学的研究人员开发了一种可扩展的触觉手套,并将其与人工智能相结合。均匀分布在手部的传感器可用于识别单个物体,估计其重量并探索在抓住它们时出现的典型触觉模式。
研究人员制造了一种手套,该手套具有548个传感器,该传感器组装在针织织物上,该针织织物包含通过导电线电极网络连接的压阻膜(也会对压力或应变产生反应)。
这是大规模记录此类信号的首次成功尝试,揭示了重要的见识,可用于将来设计假肢和机器人抓握工具。
但是,就像几乎所有其他采用电容,电阻或压电技术设计的触摸界面一样,这种触觉技术不适用于湿手指或水下。
地平线上的光学力感应
为了解决这个问题,我们开发了一种新型的触觉传感器,该触觉传感器使用有机LED(OLED)和有机光电二极管(OPD)的纳米级薄膜来测量柔软的触感。
OLED技术通常在电视和智能手机屏幕中找到。我们测量触摸感的方法基于光学力感测。
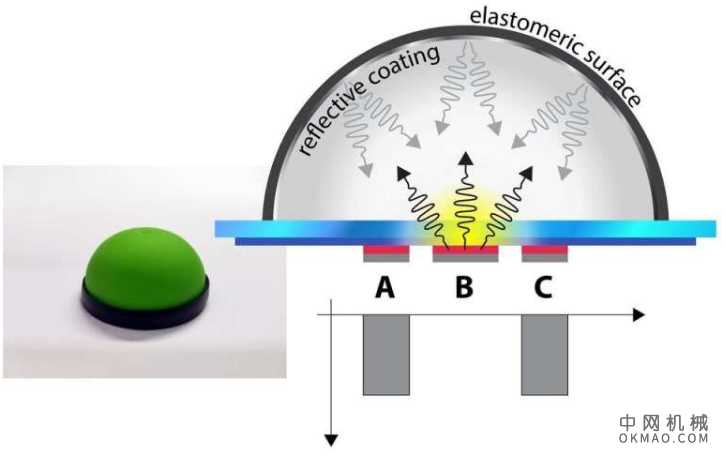
由一些OLED像素上的圆顶组成的单个触摸元件。顶部,当没有物体触摸穹顶时,从发光像素B反射到光检测像素A和C的光量相同。底部,当物体触摸穹顶时,它变形并且反射光量在像素A之间改变和C.信用:作者提供的Ajay Pandey
OLED元件(称为二极管或像素)实际上是完全可逆的。这意味着,除了能够产生光(例如在电视屏幕上)之外,这些像素还可以检测光。
使用这一原理,我们可以制造一个微小的,不透明的,柔性的圆顶,该圆顶带有一个反射涂层,该反射涂层位于一些OLED像素上方。如果圆顶不受到干扰,则从中心像素发出的光将均匀分布在圆顶下的所有其他像素上。
但是,如果按下圆顶(通过触摸某物),它将变形,从而导致用于检测反射光的像素产生不均等的响应。结合接触区域中数十个圆顶的响应,可以估计所施加的力。
这种方法是朝着简化大面积应用的智能皮肤布局迈出的重要一步,我们希望我们很快会看到在潮湿甚至水下都可以在空中进行全身感应的机器人。