
USC维特比高级制造中心的研究人员确定了一种算法,可以优化机器人,以在复杂的制造空间中提供简短,无碰撞的解决方案。
想象一下汽车组装厂:每天需要执行数千个重复任务,例如将方向盘插入汽车。一旦机器人学习到从点A(车轮堆叠的位置)到点B(车轮需要插入的位置)的最佳轨迹,它就可以执行上百万次,而不会发生错误或碰撞中国机械网okmao.com。
但是,如果仅稍微更改此任务(例如,增加车轮尺寸),则机器人将无法完成该任务。
为了帮助自动化机器人甚至在复杂的制造场景中也能提供高质量的解决方案,南加州大学维特比工程学院高级制造中心(CAM)的研究人员确定了一种使机器人在其工作区中的路径自动化的新方法。
在2019年11月4日于中国澳门举行的国际智能机器人与系统国际会议上提出的研究中,研究团队包括SK Gupta教授,史密斯国际机械工程教授和CAM主任以及博士学位。
候选人Pradeep Rajendran提出了一种新颖的路径规划算法和界面,该算法和界面可以指导机器人以最少的人工输入,从工作空间中的源点到目的地点采用最短,最快的路线。
Rajendran说:“我们提出了一种方法,用于在非常复杂的工作空间(例如,卫星组装操作)中进行操作的机械手的自动路径规划过程中,引起人工反馈。” “通常,机器人操作员使用自动路径规划器为机器人规划一条轨迹,以完成工作空间内的任务。
如果路径规划失败(这意味着建议的轨迹不会产生期望的结果),则机器人操作员必须手动输入特定的航路点沿着路径指向机器人,将机器人从源头引导到目的地。”
这种情况更常见于复杂或受限的工作空间中,例如卫星组装操作,其中更困难的工作空间几何形状,物理障碍以及更频繁的更改或自定义要求机器人执行复杂的路径。结果,机器人操作员浪费了宝贵的时间来手动输入每种情况下的信息,从而破坏了首先使用自动化的目的。
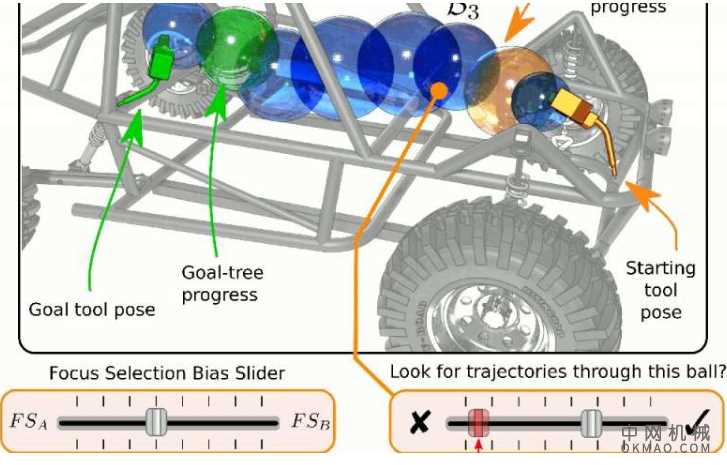
该算法的工作原理是为机器人提供了用户友好的界面,以便在路径规划中尽早收集人类操作员的输入-这是映射机器人应通过的路径以完成工作任务的过程。
通过程序中的视觉提示,操作员会被警告到机器人将需要导航的更复杂区域,并可以相应地提供信息以产生高级指令。结果,当机器人在其任务中遇到轻微变化时(例如上述车轮尺寸增加),它将能够借鉴这些指令并相应地调整其路径。
该方法由南加州大学维特比分校航空航天和机械工程系的研究人员设计,该方法还包括博士后研究助理Ariyan Kabir博士。学生Shantanu Thakar和CAM研究科学家Brual Shah优先考虑自动化,以确保路径规划程序仅在需要时才提供帮助。手动指定路径通常需要15到30分钟;使用路径规划算法,可以在几秒钟内生成路径。
Rajendran说:“在小批量制造中,机器人执行许多经常更改的非重复性任务。为这些任务的迭代进行编程不仅耗时,而且乏味且效率低下。” “通过这种新算法,我们证明了在小批量制造应用中遇到的许多非重复性过程都可以轻松实现自动化,而无需人工操作。”