


大多数人都是两足动物,但即使是我们最好的人,实际上也只有两足动物,直到事情变得棘手为止。
尽管我们的腿可能是我们的主要出行系统,但在很多情况下,我们还是会动臂以被动地保持平衡,或者在伸出手将自己稳定在附近物体上时会主动地动臂。
尽管两足机器人趋于不稳定,但使用支腿以外的任何东西来移动仍然是软件和硬件方面的挑战,这在高度非结构化的环境中是一个重大限制中国机械网okmao.com。
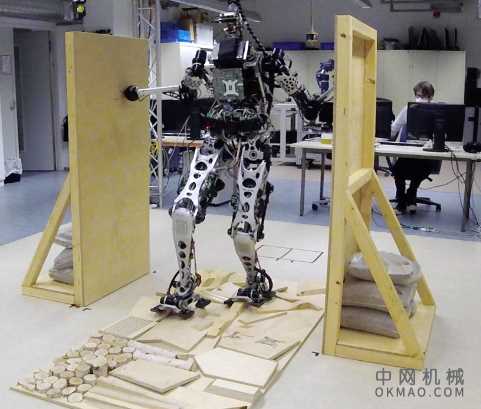
来自德国TUM的机器人专家(在德国研究基金会的支持下)最近对人形机器人LOLA进行了一些重大升级,以使这种多触点运动成为可能。尽管它仍处于早期阶段,但它已经是我们所见过的最类似于人类的两足运动了。
双足机器人在不使用四肢支撑的情况下走过充满挑战的地形肯定是可能的,但是我敢肯定,您会想到很多时候都需要使用手臂来帮助自己的双足运动。这不是必需条件,因为您的腿部力量或协调能力或平衡感一定很差。只是有时候,您可能会发现自己走过高度不稳定的地方或处于绊倒后果极高的情况下。
而且,您事先进行的感知量以及您对足迹规划的谨慎程度也可能无关紧要:您事先对环境的了解程度是有局限的,这可能会导致您度过一个非常糟糕的时光。这就是使用多触点运动(无论是否事先计划)的原因,
正如视频中所记录的(以及用于在其前面明确显示的道具)那样,这还不是完全自主的行为,需要预先手动设置脚的位置和手臂的接触点。
但是,看看如何自动完成所有工作并不费力,因为其中一个真正困难的部分(使用多个接触点来动态平衡移动中的机器人)是在船上实时完成的。
要使LOLA能够做到这一点,就需要对硬件和软件进行大修。与TUM的LOLA一起工作的Philipp Seiwald能够为我们提供更多信息。
IEEE Spectrum:您能否总结多触点运动所需的LOLA硬件更改?
菲利普·塞瓦尔德(Philipp Seiwald):LOLA的原始版本专为快速两足动物步行而设计。尽管它有两条手臂,但它们并不是要与环境接触,而是要补偿快速行走过程中脚部的动态影响。而且,躯干设计相对简单,可以满足其原始目的。然而,在多触点操纵过程中,它并不能承受来自手的高负荷。
因此,我们从头开始重新设计了LOLA的整个上身。从骨盆开始,躯干的强度和刚度增加了。我们使用有限元方法来优化关键零件,以最小的重量获得最大的强度。此外,我们为手臂增加了额外的自由度,以增加手的可触及工作空间。手臂的运动学拓扑,即
为什么对于双足类人机器人来说这是一个重要的问题?
在运动过程中保持平衡可以被认为是有腿机器人的主要目标。自然,与四脚甚至更多腿的机器人相比,此任务对两足动物更具挑战性。尽管当前的高端原型机显示出惊人的进步,但类人机器人仍然不具备大多数实际应用所需的坚固性和多功能性。
通过我们的研究,我们努力为这一领域做出贡献,并帮助进一步突破极限。最近,我们展示了在没有多触点支持的情况下在崎uneven不平的地面上行走的最新工作。
尽管鲁棒性已经很高,但是仍然存在一些场景,例如在松散的物体上行走,当仅使用脚部接触器时,机器人的稳定作用会失败。
在此(比较)的快速步行过程中,使用附加的手部环境支持可进一步显着提高鲁棒性,即机器人补偿干扰,建模错误或传感器输入不准确的能力。
除了在崎uneven不平的地形上保持稳定外,多触点运动还可以实现更复杂的运动,例如,越过高大的障碍物或仅脚趾的触点,如我们最新的多触点视频所示。
LOLA如何确定表面是否适合多触点运动?
LOLA的视觉感知系统目前由我们的项目合作伙伴由TUM的计算机辅助医疗程序和增强现实技术主席开发。该系统依赖于新颖的语义同时定位和映射(SLAM)管道,该管道可以通过合并来自不同视点的多个观察值并从中推断出场景图来稳健地提取场景的语义成分(如地板,墙壁和其中的对象)。
基于某些结构元素(例如墙壁)是固定的,而椅子不是固定的假设,这提供了一个可靠的估计,可以确定哪些场景部分可用于支持运动。
此外,该团队计划开发一个带有注释的特定数据集,以进一步描述对象的属性(例如表面的粗糙度或其柔软度),并将其用于掌握更复杂场景中的多触点运动。到今天为止,视觉和导航系统尚未完成;因此,在我们的最新视频中,我们为手使用了预定义的立足点和接触点。但是,在我们的合作中,我们正在努力建立一个完全集成和自治的系统。
LOLA是否具有主动和反应性多触点运动能力?
LOLA的软件框架具有层次结构。在最高级别上,视觉系统生成环境模型并估计场景中机器人的6D姿势。然后,行走模式生成器使用此信息来计划动态可行的未来运动,该运动将导致LOLA到达用户定义的目标位置。
在较低级别,稳定模块会修改此计划,以补偿模型错误或任何形式的干扰并保持总体平衡。因此,我们目前的方法侧重于主动的多触点运动。但是,我们还计划采取更具反应性的行为,以使意外的干扰也可能触发额外的手部支撑,而不是预先计划。
您正在使用LOLA的一些独特功能的例子有哪些?
使用LOLA进行研究的主要目标之一是在复杂,崎uneven不平的地形上保持快速,自主和鲁棒的运动。我们的目标是达到与人类相似的步行速度。
当前,LOLA可以进行多点接触运动并以1.8 km / h的速度穿越崎uneven不平的地形,这对于两足动物机器人而言相对较快,但对人类而言仍然较慢。在平坦的地面上,LOLA的高端硬件使其能够以相对较高的3.38 km / h的最高速度行走。
对于真人大小的人形机器人,完全自主的多触点运动是一项艰巨的任务。随着算法变得越来越复杂,计算时间增加,这通常导致离线运动计划方法。
对于LOLA,我们将自己限制为步态多接触运动,这意味着我们试图保留两足步态的核心特征,而仅将手臂用于帮助。这使我们能够使用机器人的简化模型,从而导致非常高效的算法实时且完全在机上运行。
LOLA的一项长期科学目标是了解人体步行的基本组成部分和控制策略。LOLA的腿部运动学与人体相对类似。我们与运动机能学的科学家一起,试图确定观察到的人类步行与LOLA的“工程化”步行步态之间的异同。
我们希望这项研究一方面能够为控制两足动物提供新的思路,另一方面希望通过对两足动物进行实验来证明是否正确理解了人类步态的生物力学模型。为了比较不平坦地形上的控制策略,LOLA必须能够以可比的速度行走,这也激发了我们对快速,健壮行走的研究。
尽管研究人员为何主要使用LOLA的手臂来协助传统的Biped步态是有道理的,但展望未来还是有些有趣的事情,思考一下我们通常认为是Biped的机器人如何潜在地利用其四肢来实现非人类的活动性方法。
我想我们习惯于绑腿机器人是一种特殊的形态,因为将它们与人,狗或其他任何东西结合在一起只是一种舒适的方式,但是并没有特别的理由为什么四肢机器人必须在四足动物,两臂双臂或两足动物混合,这取决于其任务是什么。用LOLA进行的研究可能是朝这个方向迈出的一步,也可能是朝这个方向迈出的一步。