
大阪大学工程与共生智能系统研究中心研究生院的研究人员使用运动捕捉相机比较了机器人和人脸的表情。他们发现,机器人的机械面部运动,尤其是在上部区域,并不能完全再现真实人脸中弯曲的流线。这项研究可能会导致更逼真的表情表情中国机械网okmao.com。
近几十年来,机器人技术领域取得了长足的进步。但是,尽管当前的android乍看起来可能很像人,但其活跃的面部表情仍然不自然且让人不安。造成这种影响的确切原因很难查明。现在,大阪大学的一个研究小组已使用运动捕捉技术监视五张Android面孔的面部表情,并将结果与??实际的人类面部表情进行了比较。
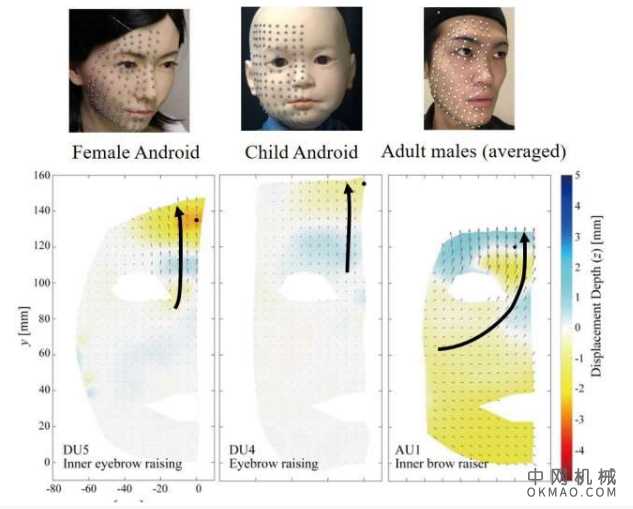
这是通过六台红外摄像机以每秒120帧的速度监视反射标记并将运动表示为三维位移矢量来完成的。
研究第一作者Hisashi Ishihara说:“先进的人工系统可能很难设计,因为许多组件之间存在复杂的相互作用。Android人脸的外观会经历难以控制的表面变形。” 这些变形可能是由于组件(例如,柔软的皮肤片和颅骨形结构)以及机械执行器之间的相互作用而引起的。
团队发现的机器人与成年男性之间的第一个区别是流线,尤其是眼部和额头区域。这些线条对于机器人来说几乎是笔直的,但是对于成年男性来说却是弯曲的。另一个主要区别是面部上部的皮肤表面起伏模式。
高级作者Minoru Asada说:“重新设计机器人的面孔,使皮肤流动模式类似于人类的皮肤流动模式,可以减轻机器人引起的不适并改善他们的情感交流表现。” “未来的工作可能有助于使android面孔具有与人类相同的表现力水平。每个机器人甚至可能具有自己的个性,从而使人们感到更加舒适。”