
设计一个能够自然运动的软机器人-像手指一样弯曲或像手腕一样弯曲-一直都是反复试验的过程。现在,哈佛大学约翰·保尔森工程与应用科学学院和威斯生物启发工程研究所的研究人员已经开发出一种根据所需运动自动设计软执行器的方法。
该研究发表在《美国国家科学院院刊》上中国机械网okmao.com。
John L. Loeb自然科学副教授Katia Bertoldi说:“我们不是要凭经验设计这些执行器,而是要提供一种工具,您可以在该工具中插入一个动作,它会告诉您如何设计执行器以实现该动作。”和该论文的合著者。
设计可以像手指或膝盖一样弯曲的软机器人看起来很简单,但动作实际上非常复杂。
SEAS的研究生,论文的第一作者Fionnuala Connolly说:“设计非常复杂,因为一种执行器类型不足以产生复杂的运动。” “您需要一系列执行器段,每个执行器段执行不同的运动,并且您希望使用单个输入来执行它们。”
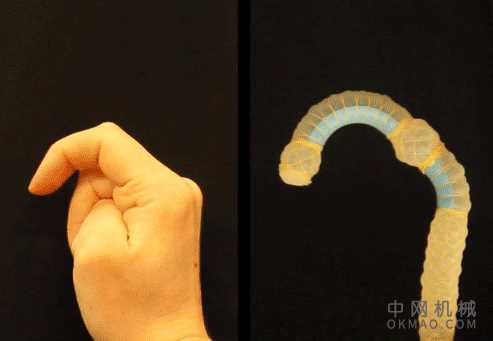
团队开发的方法使用流体动力的纤维增强执行器的数学模型来优化执行特定运动的执行器的设计。该团队使用此模型设计了一个软机器人,当由单个压力源提供动力时,它会像食指一样弯曲并且会像拇指一样扭曲。
哈佛大学的研究人员开发了一个模型来设计一个软机器人,该机器人在由单个压力源供电时会弯曲,像食指一样弯曲,而像拇指一样弯曲。图片来源:Credit Harvard SEAS
Wyss生物启发工程学院核心教授,John L. Loeb工程与应用科学副教授,Conor Walsh说:“这项研究简化了可以执行复杂动作的软机器人的设计过程。” 。“它可以用来设计沿着特定路径运动的机器人手臂或可帮助肢体运动的可穿戴机器人。”
新方法将包含在软机器人工具包中,该软件是SEAS开发的一种在线开源资源,可帮助研究人员,教育者和崭露头角的创新者设计,制造,建模,表征和控制自己的软机器人。