
加州大学伯克利分校和Facebook AI Research的研究人员最近开发了一种在未知环境中进行机器人导航的新方法。
他们的方法在arXiv上预先发表的一篇论文中提出,将基于模型的控制技术与基于学习的感知相结合。
允许机器人在周围环境中导航的工具的开发是机器人技术领域一项关键且持续的挑战中国机械网okmao.com。近几十年来,研究人员试图以多种方式解决这一问题。
控制研究界主要研究了在已知环境中的已知代??理(或系统)的导航。在这些情况下,可以使用代理的动力学模型和将要导航的环境的几何图,因此可以使用最佳控制方案来获得平滑且无碰撞的轨迹,以使机器人到达所需位置。
这些方案通常用于控制许多实际的物理系统,例如飞机或工业机器人。但是,这些方法在某种程度上受到限制,因为它们需要明确了解系统将要运行的环境。
另一方面,在学习研究社区中,通常针对探索未知环境的未知主体来研究机器人导航。这意味着系统获取策略以直接映射车载传感器读数以端对端方式控制命令。
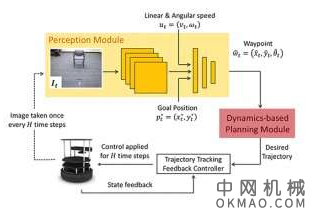
拟议的框架:导航的新方法包括基于学习的感知模块和基于动力学模型的计划模块。感知模块由一个CNN组成,该CNN输出所需的下一个状态或航路点。基于模型的计划模块使用此路标来设计控制器,以平稳地将系统调节至路标。图片来源:Bansal等。
这些方法可能具有几个优点,因为它们允许在不了解将要导航的系统和环境的情况下学习策略。
但是,过去的研究表明,这些技术在不同的媒介之间不能很好地推广。此外,学习此类策略通常需要大量的培训样本。
研究人员在论文中写道:“在本文中,我们将在完美的机器人状态测量的假设下研究静态环境中的机器人导航。”
“我们做出关键性的观察,即最有趣的问题涉及未知环境中的已知系统。这种观察激发了因子分解方法的设计,该方法使用学习来解决未知环境,并利用已知系统动力学来利用最优控制来产生平稳的运动。”
加州大学伯克利分校和Facebook的研究人员团队在高级策略上训练了基于卷积神经网络(CNN)的模型,该模型使用当前的RGB图像观测值生成一系列中间状态或“航点”。这些航路点最终会在先前未知的环境中沿着无碰撞路径将机器人引导至所需位置。
他们的方法被称为基于航点的导航(WayPtNav),实质上将基于模型的控制技术与基于学习的感知结合在一起。
基于学习的感知模块生成航点,这些航点通过无碰撞路径将机器人引导到其目标位置。另一方面,基于模型的计划程序使用这些路点生成平滑且动态可行的轨迹,然后使用反馈控制在系统上执行该轨迹。
研究人员在称为TurtleBot2的硬件测试平台上评估了他们的方法。他们的测试收集了非常有希望的结果,WayPtNav可以在混乱和动态的环境中导航,同时也胜过了端到端的学习方法。
研究人员说:“我们在模拟的现实世界中杂乱无章的环境中以及在实际的地面车辆上进行的实验表明,与纯粹的基于端到端的基于学习的替代方法相比,该方法在新颖的环境中可以更可靠,更有效地到达目标位置。写道。
这组研究人员提出的新方法可以增强新型室内环境中的机器人导航。未来的研究可能会尝试进一步改善WayPtNav,以解决其当前的一些局限性。
研究人员解释说:“我们提出的方法假设了完美的机器人状态估计,并采用了纯粹的反应性策略。” “这些假设和选择可能不是最佳的,特别是对于远程任务。结合空间或视觉记忆来解决这些局限性,将是未来硕果累累的方向。”