
尽管人类可以自然而瞬时地执行动作,但是机器人需要先进的动作计划策略才能在周围环境中导航。因此,运动计划是机器人技术研究的关键领域,旨在开发允许机器人在各种环境中自主运行的工具和技术。
尽管过去的研究已经引入了各种运动计划技术,其中最著名的是基于采样的算法,但其中大多数并不是在所有环境下都能达到最佳性能中国机械网okmao.com。
这些方法中许多方法的主要局限性在于,它们使用少量样本来近似高维空间的连通性,这在空间连通性所需区域的采样概率较低的情况下会阻碍其性能。这通常称为“狭窄通道问题”。
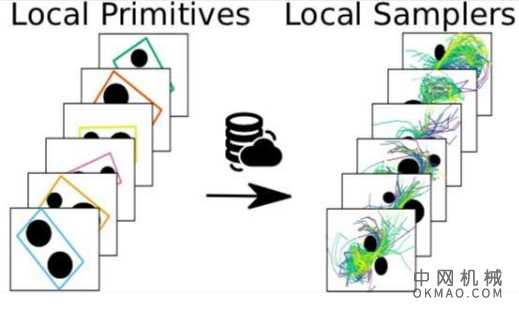
为了解决现有运动计划方法的局限性,德克萨斯州赖斯大学的研究人员开发了一种新方法,该方法将工作空间分解为局部原语,以局部采样器的形式存储其局部经验并将其存储在数据库中。
在arXiv上预发表的一篇论文中概述了他们的方法,主要是概念验证,因为到目前为止,它仅在相当简化的几何环境中进行了测试。尽管如此,这些研究人员的工作仍有可能解决运动计划研究中遇到的一些关键挑战。
“我们的研究仅着眼于几何运动计划问题,”进行这项研究的研究人员之一康斯坦丁诺斯·坎扎斯(Constantinos Chamzas)告诉TechXplore。
简而言之,您有一个机器人和一些障碍物,并且您想找到一条使机器人从A点移动到B点而不与障碍物碰撞的路径。”
除了这些常规的运动计划功能外,在现实生活中(例如在执行家务时),机器人还应解决连续重复的运动计划查询。
现有的大多数运动计划方法都迫使机器人通过从头解决新查询来完成现实生活中的任务,即使新查询类似于过去成功完成的查询。
机器人从书架上捡起钢瓶的示例,这是一项具有重复运动计划查询的任务。
因此,研究人员正在尝试开发将以前的运动计划的解决方案用于解决方案的新技术,以告知对新的类似运动计划查询的解决方案的搜索。
Chamzas和他的同事设计的方法通过使用先前与环境有关的知识来实现??这一目标,这些知识专门针对以前遇到的狭窄通道,以使其抽样策略适应当前的问题。
Chamzas解释说:“在训练过程中,所提出的方法将给定的问题分解为更简单的子问题,分别解决每个子问题,然后将这些子解决方案以抽样分布的形式存储到数据库中。”
“当出现新的计划问题时,全局问题将再次分解为局部问题,我们的方法将检索与局部问题相对应的相关采样分布,以创建一个全局采样分布,从而更有意义地指导搜索。”
本质上,Chamzas和他的同事设计的运动计划方法将问题分解为子问题,将传统的数据库方法与知情的采样相结合。
这将其与现有方法区分开来,现有方法通常使用具有预先计算的解决方案的数据库,该解决方案在运行时进行修复,或者使用试图针对给定环境推断出良好采样分布的模型。
“我们研究的两个主要贡献是,可以通过分解解决以前无法用传统方法解决的某些问题,并且在某些情况下使用数据库/采样的这种组合比其他方法更有效,”查萨斯说。
到目前为止,研究人员已经在使用简单几何图元的初步测试中评估了他们的方法。结果是有希望的,因为它们的方法,使他们能够解决的问题,以前的做法是:要么无法解决或解决很差。
将来,Chamzas和他的同事提出的方法可以帮助克服现有运动计划方法的某些局限性,使机器人可以将先前获得的知识转移到不同的环境中,从而提高其性能。
研究人员现在计划在更复杂的几何环境中应用相同的方法。他们还想探索他们的方法可以学习采样分布的方法,而不是使它们适合较旧的解决方案。