
人机界面是人与机器之间传递、交换信息的重要媒介和对话接口,能够实现机器的内部形式与人类可以接受形式之间的转换。人机界面包括皮层微电极、可穿戴传感器、外挂辅助设备等。通过这些设备,人们的想法可以很容易地转变为机器可执行的动作指令中国机械网okmao.com。为了实现多功能的人机交互,常用的做法是采用多个集成化的传感器阵列。这种做法通常存在着制备流程步骤多、信号处理布线多、能耗高等不足之处。为了实现舒适的穿戴体验,可穿戴设备需要具有高度的可拉伸性。此外,当器件受到形变拉伸时,器件能否继续稳定工作也需要进一步考虑。
近日,中国与新加坡科研人员提出了一种分层电接触结构,通过一种弯曲可自由变形的导电针线,研制出了高度可拉伸、变形不敏感的仿生触摸定位传感器。不需要集成多个传感器,通过所研制的一个器件就可以实现信号感知、传输、识别等功能一体化。相关研究成果以A highly stretchable and deformation-insensitive bionic electronic exteroceptive neural sensor for human-machine interfaces为题发表在国际知名期刊Nano Energy上(影响因子16.602,一区TOP)。该研究人员包括新加坡南洋理工大学郑元谨教授(Yuanjin Zheng)、华南理工大学徐向民教授(Xiangmin Xu)等。
经过研究发现,这种仿生触摸定位传感器拉伸不敏感性达到100%,具有超过15000次的循环测试稳定性、小于15ms的快速响应时间。器件可以自由剪切,实现定制化构建。通过数模信号转换和无线通信技术,研究团队展示这种可穿戴触摸定位传感器在无人机和智能家居的潜在应用,为高性能多功能一体化可穿戴设备的研究提供了重要的样本。
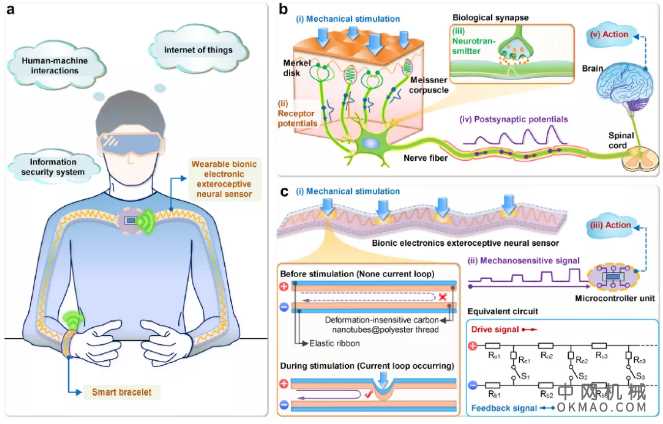
图1、可拉伸、变形不敏感仿生触摸定位传感器概念图与工作原理图

图2、研究人员展示所研制的传感器具有可剪切特性

图3、可以定制成不同的手带、手环用于无人机和智能家居的交互控制