
机器人可以用柔软的材料制成,但是这种机器人的灵活性受到其控制所必需的刚性传感器的限制。
研究人员创建了嵌入式传感器来替代刚性传感器,该传感器具有相同的功能,但为机器人提供了更大的灵活性。
软机器人比传统的刚性设计更具适应性和弹性中国机械网okmao.com。该团队使用最先进的机器学习技术来创建他们的设计。
自动化是一个越来越重要的主题,而这一概念的核心是机器人技术和机器学习的成对领域。
机器学习和机器人技术之间的关系不仅限于机器人的行为控制,而且对其设计和核心功能也很重要。在现实世界中运行的机器人需要了解其环境和自身,才能导航和执行任务。
如果世界是完全可预测的,那么机器人将可以在不需要学习任何有关环境的新知识的情况下移动。
但是现实是不可预测的,并且会不断变化,因此机器学习可以帮助机器人适应陌生的情况。尽管从理论上讲对所有机器人都是如此,但对于软体机器人而言,这尤其重要,因为它们的物理属性本质上比刚性机器人更难预测。
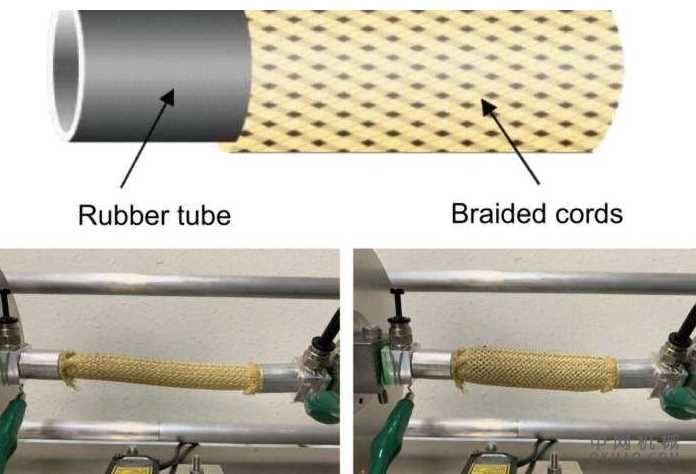
信息科学与技术学院副教授中岛耕平(Kohei Nakajima)表示:“例如,一个带有气动人工肌肉(PAM),橡胶和纤维的流体驱动系统的机器人,它们会随着运动而伸缩。“ PAM固有地会受到随机的机械噪声和磁滞的影响,这基本上是随时间的物质压力。
基于激光的精确监视器有助于通过反馈来维持控制,但是这些刚性传感器限制了机器人的运动,因此我们想出了一些新方法。”
Nakajima和他的团队认为,如果他们可以实时对PAM建模,那么他们可以保持对它的良好控制。
但是,鉴于PAM的性质不断变化,这对于传统的机械建模方法是不现实的。因此,团队转向了一种强大而成熟的机器学习技术,称为储层计算。在这里,有关系统的信息(在本例中为PAM)被实时输入到特殊的人工神经网络中,因此模型不断变化,因此适应环境。
中岛说:“我们发现PAM材料的电阻在收缩过程中会根据其形状而变化。
因此,我们将这些数据传递给网络,以便它可以准确地报告PAM的状态。” “普通橡胶是绝缘体,因此我们将碳结合到我们的材料中以更容易地读取其变化的电阻。我们发现该系统在一系列测试条件下以同样的高精度模拟了现有的激光位移传感器。”
由于这种方法,新一代的软机器人技术可能成为可能。这可能包括与人类合作的机器人,例如可穿戴的康复设备或生物医学机器人,因为额外的柔软触感意味着与它们的交互是温和且安全的。
中岛说:“我们的研究表明,储层计算还可以用于机器人技术之外的应用。遥感应用需要以分散的方式处理实时信息,这可能会大大受益。”
“以及其他研究神经形态计算(智能计算机系统)的研究人员,也可能能够将我们的想法纳入自己的工作中,以改善系统的性能。”