
人类天生就可以通过关节的骨骼内结构进行复杂的运动。韧带和肌腱弹性地连接到相当刚性的骨骼结构,使这些运动成为可能。

加利福尼亚大学圣克鲁斯分校和日本立命馆大学的研究人员最近设计并制造了受人体骨骼结构启发的机器人手指中国机械网okmao.com。在今年的无处不在的机器人和环境智能国际会议(URAI)上展示的这种仿生机械手手指是使用多材料3-D打印机组装而成的。
进行这项研究的研究人员之一Maryam Tebyani对TechXplore表示:“开发像人类手一样具有硬,软组成的机械手是我要探索多年的研究课题。” “将弹性和非弹性材料结合起来将解决机器人技术中的一个普遍空白,在柔性技术中,柔性系统可能很难处理重物,而刚性平台可能需要复杂的制造或控制才能获得与人手相当的灵活性。”
Tebyani和她的同事们最近的工作的主要目的是创造一个受自然系统启发的机器人手。但是,研究人员希望将他们的大部分精力集中在设计人造手上,而不是在制造和组装上。因此,他们决定采用最先进的3D打印方法,该方法可以简化并加速整个原型生产过程。
图片来源:Tebyani等。
Tebyani解释说:“在设计过程中利用多种材料的3D打印使我们可以自由设计3D肌腱和韧带结构,同时还允许我们在单张打印中创建电缆驱动的机器人。” “粘弹性印刷材料嵌入了我们一直在寻找的机械灵活性,因为这些材料允许产生真正有趣的被动行为。从本质上讲,该过程使机械设计能够将某些功能编程到机器人中。”
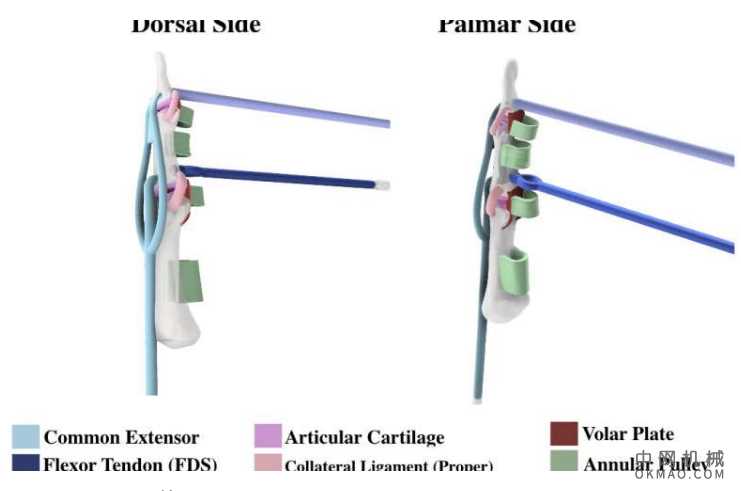
研究人员设计的机器人手指具有类似于人类的骨骼几何形状,韧带结构,人造肌肉和粘弹性腱。所有这些组件都使用多材料3-D打印机合成为单个部件。Tebyani和她的同事还使用称为MuJoCo的流行物理仿真引擎开发了手指模型。这样一来,他们就可以将机器人手指在模拟中所获得的结果与现实环境中手指的印刷原型所获得的结果进行比较。
研究人员在实验中获得的结果极有希望,突出了将3D打印和模拟技术相结合以创建复杂的机器人系统并获得对这些系统的更好控制的巨大潜力。
他们最终使用的方法使他们能够将软机器人技术中普遍使用的粘弹性材料与更传统的机器人技术相结合,从而使人类骨骼内结构的复制更为紧密。
Tebyani说:“我们提出的设计过程使我们能够缩放机器人设计中每个元素的几何形状和材料属性,以匹配各个人,并通过自主组装快速生产这些原型。”
“先进的假肢和远程操作机器人技术在与人类用户交互方面取得了令人振奋的进步。
我们正在尝试通过设计平台来辅助这一进步,这些平台是人类形态的自然延伸,而可定制模型是不可或缺的。实现这一目标。”
将来,这组研究人员使用的设计和制造过程可以应用于创建其他几种受生物启发的机器人结构,例如其他受人类或动物启发的肢体。此外,他们开发的仿生手指可用于开发机械手,然后将其连接到现有和新机器人上。
Tebyani说:“我们目前正在努力将该设计扩展到整个手和手腕,以实现对象操纵。” “我们还计划开发依赖于所提出的制造方法的变型的设计,以便可以使用其他机器人专家更容易使用的3-D打印机实现这些系统。”