
电机如何将其角位置或旋转速度从起点提升到预期目标值是现代电机控制器以多种方式解决的复杂话题。
控制电机的运动是一个主要的设计挑战,因为一个可能的电机选择如何能够提高其速度和位置是确定它适合应用程序的主要因素。除了最简单的低端情况(例如廉价玩具)之外,电机控制是一个复杂的主题,有许多解决方案,每个解决方案都有不同的“最佳”性能指标中国机械网okmao.com。在许多工程情况下,没有单一的“最佳”电机和运动控制。尽管如此,仍然存在一系列复杂的可能性,每种可能性都在许多因素和权衡之间提供了不同的平衡。
这种复杂性有多种原因。电机世界由两个基本交流和直流电源组中的几乎无数组、变体和子变体组成。没有“完美”或什至非常好的 moto-family tree 或系谱,因为每一个都是以其来源或作者的合法观点和偏见创建的,如图 1、2 和 3 所示。有一件事是肯定的:每个电机类型或组都有不同的属性,提供不同的性能特征,并且需要不同的控制器细节。
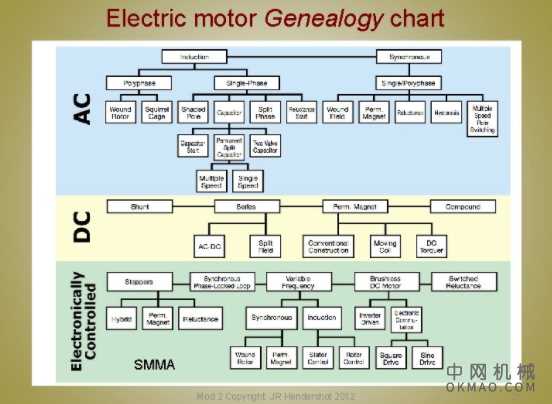
图 1:这个电机“家谱”将交流、直流和 EC 电机分开,给出了大致相同的细节。(图片:幻灯片文档)

图 2:相比之下,该图表更侧重于交流电机,对直流电机的关注较少,几乎没有对 EC 电机的关注。(图片:InstrumentationTools.com)
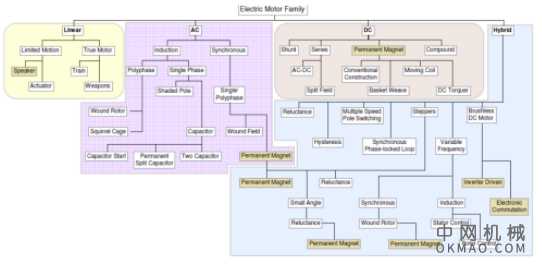
图 3:该图表赋予直流电机,尤其是永磁电机更大的权重。(图片:来自 Rollin J. Parker 的“Advances in Permanent Magnetism”,来自 Arnold Magnetics)
对于许多工程师来说,最感兴趣的电机是有刷直流电机、无刷直流 (BLDC) 电机(也称为电子换向或 EC 电机、步进电机和交流电机。请注意,虽然交流电机之间似乎存在明确的界限)和直流电机,这也是一个角度问题,因为可以证明 BLDC/EC 电机实际上是电子换向交流电机。
参数和优先级
电机和运动控制复杂性的另一个原因是许多因素表征了每种类型可能“最擅长”做什么。这些包括:
绝对旋转定位和精度;
转速(rpm)和精度;
加速度;
可交付扭矩;
位置和速度的超调量;
达到所需位置或速度所需的时间和斜率;
加速度约束,以及加速度的最小/最大变化率(正式命名为“jerk”);
前期成本以及持续的运营和能源成本。
例如,某些应用程序强调位置或速度目标上的 A 点和 B 点之间的快速传输时间。其中包括龙门架、高速缝合、电子拾放机、绘图仪、机械臂、天线/跟踪系统控制和 3D 打印系统。其他人更专注于以最小的抖动进行平滑运动,即使以降低速度为代价,例如医疗或化学分析自动化、电梯、医疗诊断扫描仪、半导体加工、设备和科学仪器。具有设计优先级(这里是速度与平滑运动)并不意味着其他参数不重要;相反,重要的是它们之间的相对权重。

图 4:运动控制器是上级系统处理器和为电机供电的驱动器之间的智能接口;可选的运动传感器在某些架构中提供反馈。
这种调制是通过增加或减少驱动电机的电压或电流或通过驱动电压/电流的脉宽调制 (PWM) 来实现的。除了性能优先级之外,选择部分还取决于电机类型;例如,PWM 通常比电压或电流的模拟调制更节能,但可能会引起颤振或“抖动”运动。
同样重要的是要认识到,电机本身并不是电机控制器的最终负载,而是电机本身驱动的任何负载。这意味着任何电机驱动和控制分析还必须考虑该负载的细节:其质量、性质(刚性或柔性)、负载的变化(正在填充的瓶子)等等。还必须评估系统共振和惯性的主要问题。
开环或闭环
电机和运动控制的另一个主要考虑因素是是否会有来自电机或其负载的反馈以支持闭环控制。反馈传感器通常是旋转编码器、光学编码器或霍尔效应器件。每一种都在成本、分辨率、坚固性和安装难度方面进行权衡。是否使用反馈取决于准确性和性能要求以及优先级。
如果在闭环布置中使用反馈,则运动控制器必须嵌入闭环算法,通常是 PID(比例-积分-微分)方案或该广泛使用方法的某些变体。无论使用哪种反馈传感器,它们都会报告转子位置,这可以是绝对的或相对的,具体取决于传感器类型和设置。如果电机控制侧重于速度或加速度而不是位置,则位置信号和数据必须在时间上区分一次(对于速度)或两次(对于加速度)。
近年来,基于电机电流或反电动势 (EMF) 的实时测量的无传感器反馈成为了朋友。这样做需要基本的电流或电压感测,并且比单独的反馈传感器更简单、更便宜、更可靠且更容易在物理上完成。这种无传感器反馈通常使用场定向控制 (FOC) 算法(也称为矢量控制),由于数字信号处理性能的提高,现在在许多情况下是一种可行的选择,从而能够执行可以提供令人印象深刻的控制结果的复杂算法.
本文的其余部分将探讨与电机运动控制曲线相关的问题,通常称为“斜坡”或“轨迹”。它不会着眼于各种电机技术,因为这是另一个复杂的话题,虽然明显相关。一般来说,电机是一个复杂的主题,有许多微妙之处、指南、例外和机电问题。本文的第 2 部分着眼于一些常见的斜坡选项。