
加州大学戴维斯分校和卡内基梅隆大学的工程师们已经开发出了一种机械手,该机械手使用工程细菌对特定的化学物质进行“品尝”。夹具是基于生物学的软机器人的概念证明。
加州大学戴维斯分校生物医学工程学助理教授Cheemeng Tan说:“我们的长期愿景是为软机器人构建合成微生物群,以帮助修复,产生能量或对环境进行生物传感中国机械网okmao.com。” 该作品于6月26日发表在杂志上科学机器人。
软机器人使用轻巧,灵活和柔软的材料来创建与生物的多功能性相匹配的机器,而软机器人的设计通常会从自然中汲取灵感。
将实际的活细胞添加到软机器人中,使科学家又朝着制造生物机械混合机迈出了一步。
Carmel Majidi说:“通过将我们在柔性电子产品和机器人皮肤方面的工作与合成生物学相结合,我们接近了诸如软性生物混合机器人之类的未来突破,它们可以适应环境条件的变化来感知,感知和移动能力,” CMU机械工程的合著者和副教授。
视频显示了嵌入大肠杆菌的软模块对环境的感知功能。工程细菌的生物传感
新设备使用基于大肠杆菌生物感测模块的细菌通过产生荧光蛋白工程化以于化学IPTG响应。
所述的细菌细胞驻留在井,允许化学品进入但保持内部的细胞的柔性,多孔膜。该生物传感模块内置在机械臂上的柔性抓手表面中,因此抓手可以通过其手指“品尝”环境。
当IPTG穿过膜进入腔室时,细胞发出荧光,模块内部的电子电路检测到光。电信号传输到抓具的控制单元,该控制单元可以决定是捡起还是放开它。
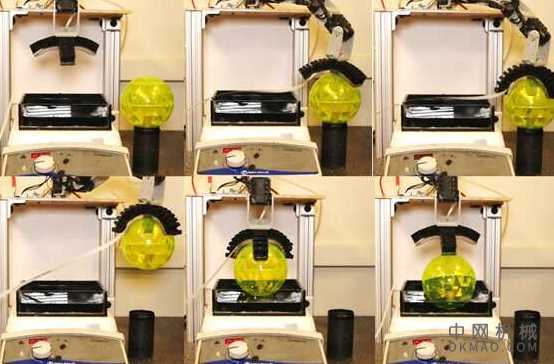
作为测试,抓具能够检查实验室水浴中的IPTG,然后决定是否在水浴中放置物体。
Tan说,到目前为止,这种生物杂交机器人只能尝一尝,而且很难设计出能够检测浓度变化的系统。
另一个挑战是要在机器人内或机器人上保持稳定的微生物种群,这与生活在我们体内或体内的细菌和真菌的微生物组或生态系统相比,对我们而言具有许多有用的功能。
演示实验设置和IPTG检测拾放测试的视频,如果发现浴包含IPTG,则不会部署该对象;如果发现浴液中不含IPTG,则手臂会捡起物体并将其放入浴液中。
他说,生物混合系统比传统的机器人技术具有更大的灵活性。细菌可以在机器人上实现各种功能,例如检测化学物质,制造聚合物以进行修复或产生能量。