


韩国机械材料研究所(校长春虹公园;以下称“ KIMM”)开发了一种机器人手,能够处理日常生活中的各种物体和工具,例如用一把剪刀握住鸡蛋和切纸。该手可以轻松地安装在各种机械臂上,并提供世界上最强大的抓握力来抵御自身重量。预计机器人手的使用将扩展到工业现场以及日常生活中中国机械网okmao.com。
KIMM先进制造系统研究部门的机器人与机电一体化系首席研究员Hyunmin Do博士领导的团队开发了一种机器人手,该机器人手能够通过模仿结构和动作来以与人的手相同的方式处理物体人的手指。
机械手由四个手指和16个关节组成。总共12个电机用于独立移动每个手指和关节。
研究团队开发了一种独特的机制,可以在小空间内以高度自由度支持运动,类似于人的手部运动。他们通过将负责手指移动的驱动单元嵌入手掌中,成功地将其模块化。机械手可以轻松地安装在各种机械臂上。
另外,已开发的机械手比市售的机械手更轻更结实。它的重量小于1千克,但其有效载荷大于3千克。
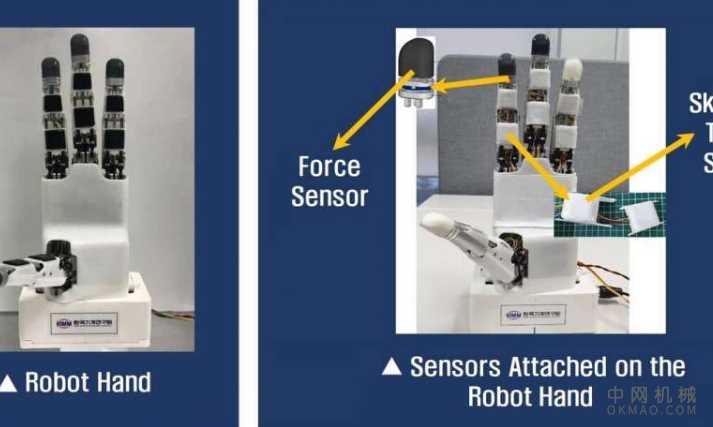
该研究小组开发了两种类型的力传感器,以进行触觉检测,以检测与物体的接触,并将其连接到指尖,手指和手掌上。指尖上安装的传感器是直径为15 mm,重量小于5 g的多轴力/扭矩传感器。当机器人手接触到物体时,它们可以测量在指尖检测到的力的大小和方向。传感器是控制抓握力的关键。
演示使用机械手1的运动(供水)来源:韩国机械材料研究所(KIMM)
演示使用机械手2进行运动(弹奏钢琴和挥手)图片来源:韩国机械材料研究所(KIMM)
通过与首尔国立大学的联合研究开发的皮肤型触觉传感器也安装在手指和手掌上。这些传感器测量机器人手触摸物体时在接触区域的力分布。
到目前为止,由于没有模块化的产品同时配备嵌入在手掌区域内的驱动单元和内置的触觉传感器,因此迄今为止开发的商用机械手的应用受到限制。
杜贤敏博士说:“机器人手的开发是通过模仿人的手的细微动作来处理各种物体,包括日常生活中使用的工具。它还有望用作研究机器人抓握算法的研究平台。机器人的手和操纵智能。”