


在过去的一个月中,我被NASA的Ingenuity直升机迷住了。我很想知道更多有关直升机的定位和状态估计技术的信息–直升机使用哪些传感器和软件来确定其位置和方向?
幸运的是,美国宇航局渴望分享其成就的技术细节,而典型的商业机器人技术公司却试图超越竞争对手。因此,我阅读了NASA研究人员发表的描述该直升机及其软件的几篇博客文章和学术论文中国机械网okmao.com。这是我发现的。
状态估计和本地化
首先,一些背景。任何移动机器人的基本子系统都是本地化和状态估计。本地化是指机器人知道某个参考坐标系中的位置的能力-考虑一下GPS接收机会告诉您您的纬度,经度和海拔高度。机器人的方向(或“航空说话”中的“姿态”)也很受关注,通常由定位系统跟踪。
状态估计使这一步骤更进一步,还可以捕获机器人的线性和角速度以及加速度。这对于飞行器尤其重要,因为持续的安全飞行取决于将飞行器保持在其安全的运行范围内。定位和状态估计将获取原始传感器值(像素,LiDAR返回值,加速度计读数等),并将其转换为对机器人运动的估计。该估计值用作机器人控制和导航子系统的输入。
如果没有这些系统,飞机可能会进行第一次飞行,但对于第二次飞行而言,它们是必不可少的。如果没有估计机器人的运动,安全着陆的希望就很小。
观看3D智能直升机飞行
想假装你在火星上吗?美国宇航局发布了Ingenuity Helicopter第三次飞行的新3D视频。您需要一些老式的红色和蓝色3D眼镜才能享受完整的体验。如果您没有3D眼镜,NASA可以帮助您在家中制作自己的眼镜。
感测器
机器人技术已经使用了多种传感器。自动驾驶汽车的标志是传感器的花园,它们在汽车的屋顶上发芽。相比之下,Ingenuity直升机只有三个用于定位的传感器:一个向下的摄像头,一个惯性测量单元(IMU)和一个高度计。IMU包含加速度计和陀螺仪,就像机器人的内耳一样。高度计是一个朝下的激光测距仪。相机是灰度的,只有0.3兆像素。这三个传感器都是现成的组件:
IMU:博世Sensortec BMI-160
相机:Omnivision OV7251
激光测距仪:Garmin Lidar-Lite-V3
演算法
给定这些传感器,Ingenuity如何确定其位置?单独的IMU可以提供车辆姿态和速度的估计,这是航位推算的过程,但是此估计中的错误会很快加重。独创性在起飞和降落时使用航位推测法数秒,这时转子的向下冲洗可能会扬起足够多的灰尘,使相机和高度计不可靠,但是一旦达到1米的高度,相机和高度计也将用于估算直升机的位置和速度。
高度计可以直接测量直升机的高度,但是如何将像素转换为直升机的位置和速度的度量呢?凭直觉,绝对有可能根据所捕获的图像序列来估计摄像机的运动–想象一下,使用电影《古德费拉》中的经典单幅序列来勾勒亨利和卡伦在科帕卡巴纳厨房中走过的路。
相关: 听到火星上飞舞的第一个创造力的声音
为了使机器人具有这种??运动感,它会比较在不同时间拍摄的图像帧,以查看环境相对于相机的移动情况,此过程称为视觉测距法。独创性使用稀疏的视觉测距法:对于每个帧,都会识别出几十个不同的点,并且仅逐帧地跟踪这些点。
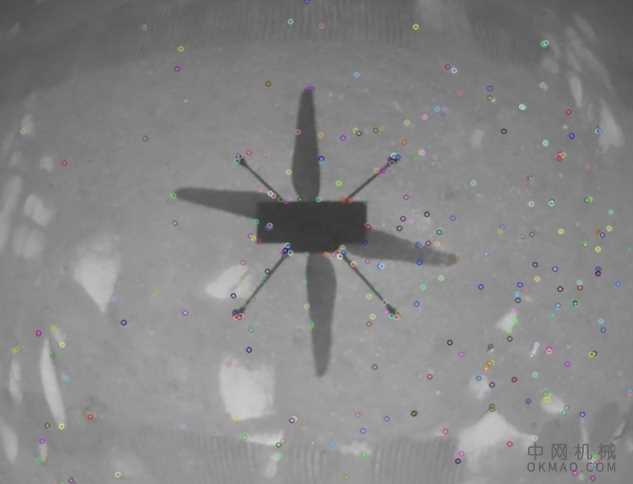
对图像进行处理以识别这些特征,并为每个特征计算一个签名,以便可以将它们与先前和将来帧中的相应特征进行匹配。独创性使用FAST拐角检测器来识别特征;这是带有以彩色圆圈标记的FAST功能的导航凸轮图像。
其中一些功能会分散注意力-阴影将随直升机一起移动,因此与阴影相关的功能将成为异常值-但许多功能并非如此,并且将以协调的方式移动。视觉测距算法可找到以一致方式移动的最大特征集,并据此估计直升机的运动:如果所有点都从左到右移动,则直升机的运动是从右到左;
如果这些点都从左到右移动,则直升机从右到左移动。如果某些点以一种方式移动,而另一些点以另一种方式移动,则直升机必须在旋转。
解决此问题的一种常用方法是估算机器人的运动和每个特征的3D位置,同时给出机器人的位置和环境中的特征图。这称为SLAM,或同时进行的本地化和映射。但是,独创性不需要功能图,并且具有有限的计算能力(2.26 GHz四核Snapdragon 801处理器和2 GB RAM),因此为了简化问题,它使用了称为MAVeN的视觉惯性测距系统不估计特征位置。
假定直升机在平坦的地面上飞行,因此所有要素的深度相同,并且可以从高度计中获知。MAVeN还合并了IMU测量值,以生成对直升机位置,方向和速度的完整估计。
回到地球
我暗示了Ingenuity上使用的系统与该星球上使用的常见机器人技术之间的一些差异。Ingenuity系统是一个准系统演示平台,它克服了重大技术挑战,可以在距地球1.8亿英里的距离上实现自主,可控,可重复的飞行。
陆地移动机器人是指带有与地球地面接触的轮子的机器人,它可以使用各种各样的传感器和算法来完成除往返飞行之外的有用任务。例如,LiDAR和车轮编码器通常用于补充相机。
机器人可能需要构建新空间的地图,或者在随时间变化的环境中维护和更新地图。识别移动物体并避免碰撞是轮式机器人的另一个常见要求,尤其是当它们在有人或其他机器人的环境中工作时。所有这些任务归结为从像素,LiDAR返回和其他传感器输出中提取有用的信息。
结论
Ingenuity直升机是一项了不起的技术演示。它为未来火星的空中探索以及地球上无人驾驶技术的发展打开了大门。我为Ingenuity的更多新闻和图片以及未来的外星飞行感到兴奋。